
Mechanische Schwingungen gehören zu den Grundlagen der Physik, weil sie zeigen, wie ein System Energie aufnimmt, speichert und wieder abgibt. Genau deshalb sind sie nicht nur für Pendel und Federn wichtig, sondern auch für Maschinen, Fahrzeuge, Bauwerke und Messgeräte. In diesem Artikel ordne ich die wichtigsten Begriffe, die Schwingungsarten und die praktische Rolle von Resonanz so, dass der Zusammenhang schnell klar wird.
Die wichtigsten Punkte zu Schwingungen in der Mechanik auf einen Blick
- Eine Schwingung ist eine Bewegung um eine Gleichgewichtslage, die durch eine Rückstellkraft getragen wird.
- Amplitude, Frequenz, Periode und Phase beschreiben das Verhalten präzise.
- Freie, gedämpfte und erzwungene Schwingungen unterscheiden sich vor allem darin, woher die Energie kommt und wohin sie verschwindet.
- Resonanz ist nützlich, wenn man sie nutzt, und riskant, wenn sie unkontrolliert auftritt.
- Reale Systeme sind fast nie ideal: Dämpfung, Reibung und Materialeffekte verändern das Ergebnis spürbar.
Was eine Schwingung in der Mechanik wirklich ausmacht
Ich trenne bei der Beschreibung zuerst zwischen Bewegung und Ursache. Nicht jede Hin-und-her-Bewegung ist automatisch interessant; entscheidend ist, dass ein System nach einer Auslenkung wieder in Richtung seiner Ruhelage zurück will. Diese Rückkehr entsteht durch eine Rückstellkraft, also eine Kraft, die der Auslenkung entgegenwirkt.
Ein einfaches Feder-Masse-System zeigt das sauber: Wird die Masse ausgelenkt, zieht die Feder sie zurück, sie überschießt die Ruhelage, und der Vorgang wiederholt sich. Solange die Kraft näherungsweise proportional zur Auslenkung ist, spricht man von einer linearen Schwingung; als Näherung gilt dann F = -D·x, wobei D die Federkonstante ist. Genau hier beginnt die Physik, die später auch bei komplexeren Maschinen noch funktioniert. Als Nächstes lohnt es sich, die Größen sauber zu benennen, denn ohne sie wird jede Rechnung schnell unübersichtlich.
Die Größen, mit denen ich sie beschreibe
Wenn ich eine Schwingung analysiere, schaue ich zuerst auf vier Größen: Auslenkung, Amplitude, Periode und Frequenz. Die Auslenkung beschreibt den aktuellen Abstand von der Ruhelage, die Amplitude den größten Betrag dieser Auslenkung. Für die Zeitbeschreibung sind T = 1/f und ω = 2πf die beiden Beziehungen, die man wirklich im Kopf haben sollte. Eine Frequenz von 2 Hz bedeutet zum Beispiel zwei vollständige Schwingungen pro Sekunde, also eine Periodendauer von 0,5 s.
| Größe | Symbol | Wofür sie steht |
|---|---|---|
| Auslenkung | x(t) oder y(t) | Momentane Lage relativ zur Ruhelage |
| Amplitude | A | Größte Auslenkung im Verlauf |
| Periodendauer | T | Zeit für einen vollständigen Durchlauf |
| Frequenz | f | Schwingungen pro Sekunde |
| Kreisfrequenz | ω | Winkelmaß der zeitlichen Änderung |
| Phase | φ | Startlage und zeitliche Verschiebung |
| Eigenfrequenz | f0 | Natürliche Frequenz des Systems |
Die einfache Sinusform x(t) = A · sin(ωt + φ) ist dabei kein Dogma, sondern ein sehr brauchbares Modell. Ich verwende es immer dann, wenn ein System näherungsweise linear reagiert und die Bewegung regelmäßig bleibt. Genau deshalb ist die Beschreibung so nützlich: Sie macht aus einer sichtbaren Bewegung ein rechenbares Muster. Im nächsten Schritt wird der Unterschied zwischen freien, gedämpften und erzwungenen Verläufen wichtig.
Freie, gedämpfte und erzwungene Schwingungen im direkten Vergleich
Der sauberste Unterschied liegt in der Energiefrage. Bei einer freien Schwingung startet das System durch eine Anfangsauslenkung und bewegt sich anschließend ohne laufende äußere Anregung weiter. Bei einer gedämpften Schwingung geht Energie laufend verloren, meist durch Reibung, Luftwiderstand oder innere Materialverluste. Bei einer erzwungenen Schwingung liefert eine äußere Kraft ständig neue Energie nach.
| Typ | Was treibt es an | Typisches Verhalten | Beispiel |
|---|---|---|---|
| Freie Schwingung | Anfangsauslenkung | Ideal konstant, real oft abklingend | Eine Stimmgabel nach dem Anschlag |
| Gedämpfte Schwingung | Keine dauerhafte Anregung, aber Verluste | Die Amplitude sinkt mit der Zeit | Ein Fahrzeug nach einer Bodenwelle |
| Erzwungene Schwingung | Periodische äußere Kraft | Stationärer Zustand nach dem Einschwingen | Eine Maschine mit Unwucht |
Ich halte die Unterscheidung für zentral, weil viele Missverständnisse daraus entstehen, dass man Dämpfung und Anregung zusammenwirft. In Wirklichkeit ist fast kein reales System ungedämpft; das idealisierte Modell hilft beim Rechnen, die reale Maschine zeigt aber fast immer eine Abschwächung. Und genau an diesem Punkt taucht Resonanz auf.
Warum Resonanz so nützlich und so riskant sein kann
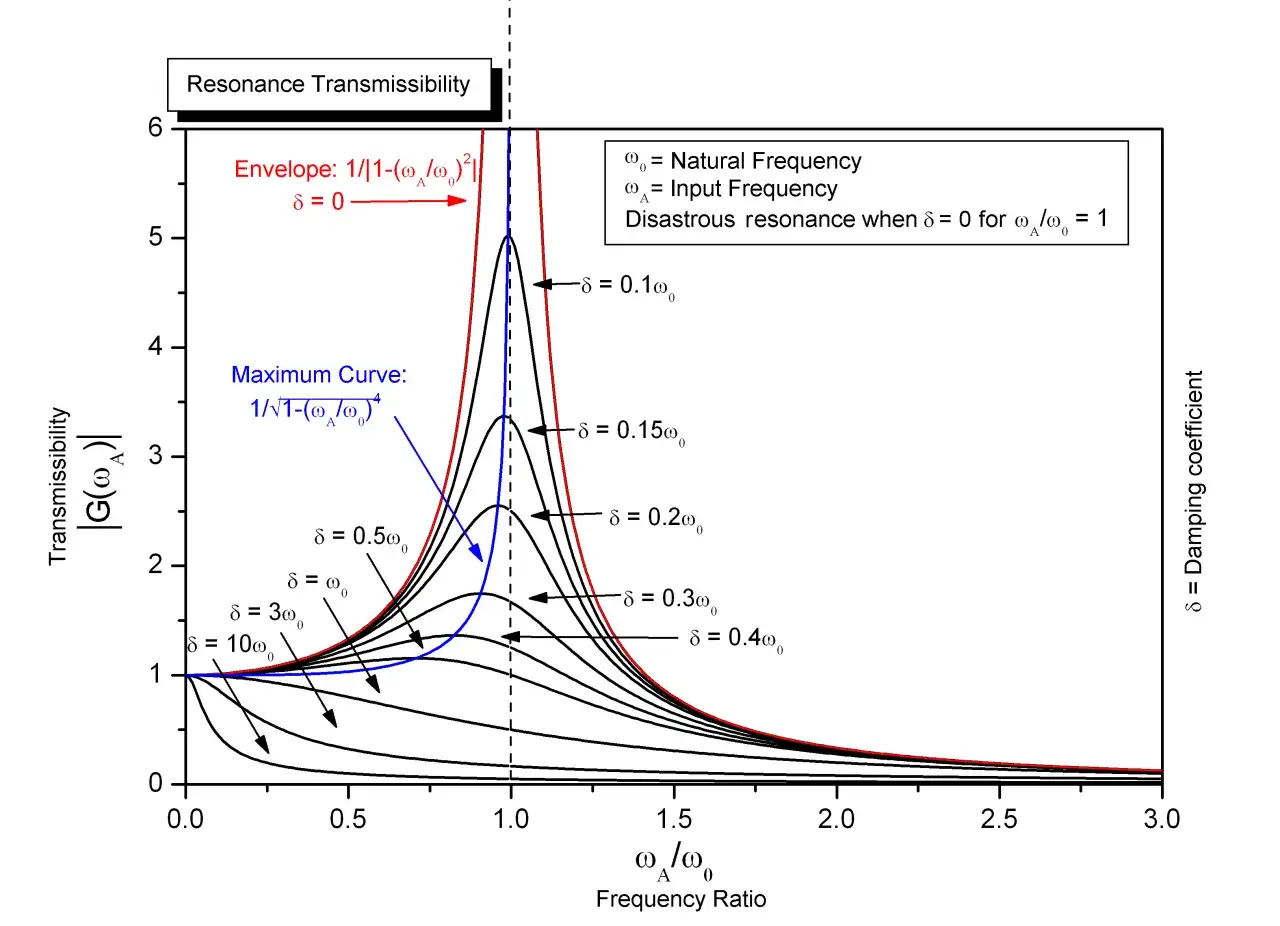
Resonanz entsteht, wenn die Erregerfrequenz in die Nähe der Eigenfrequenz eines Systems kommt. Dann wächst die Amplitude oft deutlich an, weil dem System in der richtigen Taktung Energie zugeführt wird. Bei geringer Dämpfung kann der Effekt sehr scharf ausfallen; bei stärkerer Dämpfung wird der Peak flacher und breiter.
Ich sehe Resonanz nie nur als Problem. Ein Musikinstrument nutzt sie bewusst, ein Sensor profitiert oft von einer klaren Ankopplung, und auch Messverfahren arbeiten genau in diesem Bereich. Kritisch wird es dort, wo Bauteile ungewollt in diesen Bereich geraten, etwa bei rotierenden Maschinen, Brücken, Gehäusen oder langen Trägern. Dann reichen schon kleine Anregungen, um große Schwingwege auszulösen.
Für die Praxis heißt das: Nicht nur die Frequenz selbst ist wichtig, sondern auch die Frage, wie breit der Resonanzbereich ist und wie stark das System gedämpft wird. Das führt direkt zu den Beispielen, an denen man die Physik gut erkennt.
Typische Beispiele aus Technik und Alltag
Am anschaulichsten wird das Thema an Systemen, die viele Menschen kennen. Ich nehme dabei bewusst Beispiele, bei denen man nicht nur die Bewegung sieht, sondern auch sofort versteht, warum sie relevant ist.
| Beispiel | Was schwingt | Warum es wichtig ist |
|---|---|---|
| Pendel oder Metronom | Auslenkung um eine feste Ruhelage | Zeigt besonders klar den Zusammenhang zwischen Länge, Rückstellkraft und Periodendauer |
| Autofederung | Karosserie, Feder und Dämpfer | Hier geht es um Komfort und darum, dass das Rad den Kontakt zur Straße behält |
| Waschmaschine mit Unwucht | Trommel und Gehäuse | Die Erregerkraft kann stark anwachsen, wenn die Drehzahl ungünstig liegt |
| Maschinenfundament | Ganze Anlage auf Lagerung | Entkopplung reduziert Körperschall und schützt die Umgebung |
| Balken oder Platte | Biegeschwingungen im Bauteil | Wichtig für das Bauwesen, weil Eigenformen die Belastbarkeit beeinflussen |
Der gemeinsame Nenner ist immer derselbe: Die Anregung trifft auf ein System mit eigener Dynamik, und genau daraus entsteht das Verhalten. Wer diese Beispiele verstanden hat, erkennt auch schneller, wo typische Analysefehler liegen.
Welche Fehler man bei Analyse und Berechnung leicht macht
Die häufigsten Fehler sind erstaunlich bodenständig. Sie entstehen nicht, weil die Physik kompliziert wäre, sondern weil man zu schnell mit einem Modell arbeitet, das für die Situation noch nicht passt.
| Fehler | Typische Folge | Was ich stattdessen prüfe |
|---|---|---|
| Amplitude und Frequenz verwechseln | Die Bewegung wird falsch eingeordnet | Ich trenne stets zwischen Größe der Auslenkung und Anzahl der Schwingungen pro Sekunde |
| Dämpfung ignorieren | Die Rechnung sagt zu große Werte voraus | Ich frage zuerst nach Reibung, Luftwiderstand und Materialverlusten |
| Eigenfrequenz mit Anregungsfrequenz gleichsetzen | Man übersieht Resonanznähe | Ich vergleiche Betriebspunkt und natürliche Frequenz getrennt |
| Nur einen Messpunkt betrachten | Das Bauteil wirkt harmloser als es ist | Ich prüfe mehrere Stellen, weil Schwingungsformen ortsabhängig sind |
| Große Auslenkungen linear rechnen | Das Modell verliert Genauigkeit | Ich kontrolliere, ob Rückstellkraft und Weg noch ungefähr proportional sind |
Gerade der letzte Punkt wird oft unterschätzt. Solange die Bewegung klein bleibt, ist die lineare Näherung bequem und meist ausreichend; bei größeren Wegen kippt das Verhalten aber schnell in eine Richtung, die ohne Messung schwer sauber vorherzusagen ist. Genau deshalb lohnt sich zum Schluss eine einfache Prüfroutine, bevor man an einer Anlage etwas verändert.
Worauf ich bei auffälligen Schwingungen zuerst achte
Wenn ein System auffällig vibriert, gehe ich in drei Schritten vor. Erstens bestimme ich, was die Anregung auslöst: Drehzahl, periodische Kraft, Unwucht oder Stoß. Zweitens schaue ich auf die Eigenfrequenz und darauf, ob der Betriebspunkt gefährlich nah daran liegt. Drittens prüfe ich die Dämpfung, weil sie darüber entscheidet, ob ein Effekt nur messbar oder بالفعل störend wird.
- Frequenz verschieben, wenn die Anregung vermeidbar ist, zum Beispiel durch andere Drehzahl oder andere Taktung.
- Dämpfung erhöhen, wenn der Peak abgeflacht werden soll, etwa durch geeignete Dämpfer oder Materialkombinationen.
- Steifigkeit oder Masse anpassen, wenn die Eigenfrequenz bewusst aus einem kritischen Bereich heraus soll.
- Messung verfeinern, wenn unklar ist, ob ein lokales Problem oder eine systemweite Anregung vorliegt.
Wer so vorgeht, spart sich viele Fehlannahmen und sieht schneller, ob eine Schwingung nur charakteristisch für das System ist oder bereits zum Risiko wird. Für mich ist genau diese Unterscheidung der Punkt, an dem aus einer theoretischen Beschreibung eine brauchbare technische Entscheidung wird.